 本校マシンのタイヤ製作過程及び後輪駆動部についてアップしました。
14年度配布のCPUに対応したC言語での開発環境と、簡単な模範プログラムを掲載しました。
本校マシンのタイヤ製作過程及び後輪駆動部についてアップしました。
14年度配布のCPUに対応したC言語での開発環境と、簡単な模範プログラムを掲載しました。|
【2002年全国大会、2001年度四国大会 優勝マシン(同型) 】 【ロボフェスタ関西・ロボフェスタ神奈川 優勝マシン(同型)】 【2001年全国大会、2000年度四国大会 優勝マシン】 |
|
2001年全国大会 優勝タイム:24秒04 操縦者 :山下 泰樹 2002年全国大会 優勝タイム:24秒42 操縦者 :山岡 亨 |
|
【特徴】 全長 :約47cm 2001年は約50cm 全幅 :約12cm 重量 :約700g 駆動方法 :前輪駆動 操舵方法 :ピボットターン |
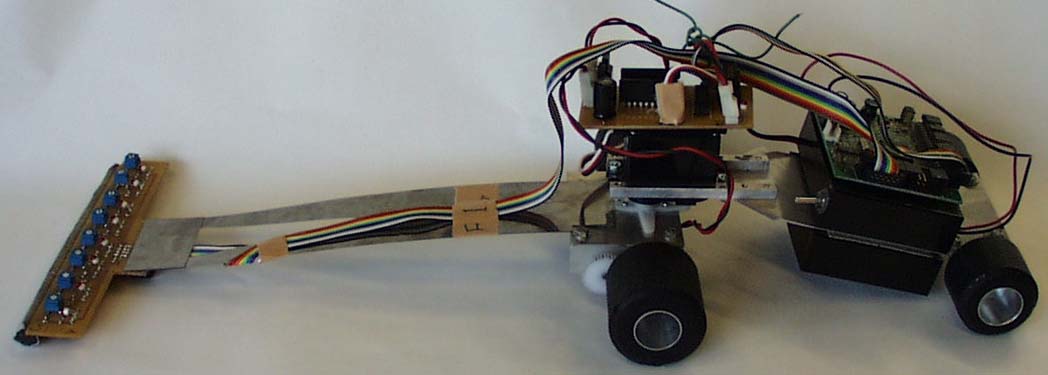 写真をクリックすると2002年優勝マシンの拡大写真が表示されます ○斜め前からの拡大写真 |
| 【センサ】 | 【前輪】 |
| センサ部は基本的にはキットと同じ物である。軽量化するために基板を焼き直しています。 | タイヤの材質は発泡ウレタンで、表面にはシリコンゴムをコーティングしてグリップ力を良くしています。直径は42mm,幅は40mmです。モータはマクソン製で定格4.5V用です。右タイヤはダイレクトドライブで、左タイヤはモータのオフセット距離をギヤで伝達しています。 |
 | 
|
| 【特徴】 |
|
◎車体 ●車体はできる限り軽く作る。一部を除きオールジュラです。 ●後輪の直径35mm,幅30mmです。回転はフリーです。 ●サーボはKO製のPS-2173FETを用いています。 ●センサを支持している板状のものは薄い板鋼です。 ◎制御 ●速度はディップスイッチにより16段階に切り替えられる。 ●コースをプログラミングしていない。 ●制御プログラムはCで書いている。 ●できる限りブレーキをかけないように走る。 ●基本的にハンドリングはコースに対しリニアです。 |
| 【今後の課題】 |
|
●このマシンではこれ以上の記録は望めない。 ●モータの高出力化。 ●タイヤグリップ力のアップ。 ●サスペンションの強化。 ●コースのプログラミング??? ●電池代をどうするか。モータ用電池は1周,サーボ用電池は2周で交換している。 |
{kind=link}